Locomotion of the fish-like foil under own effort
Locomotion of the fish-like foil under own effort
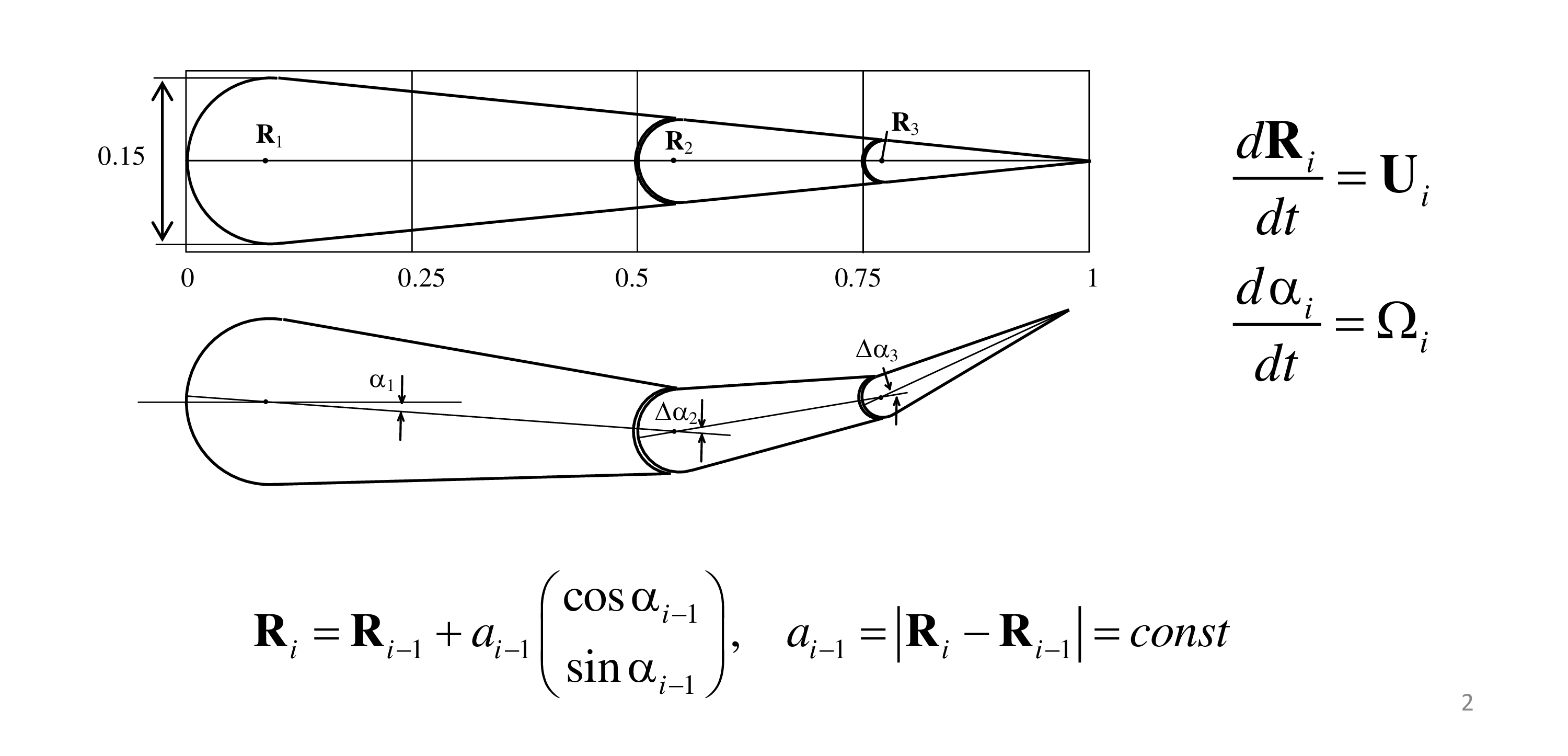
The fish-like model
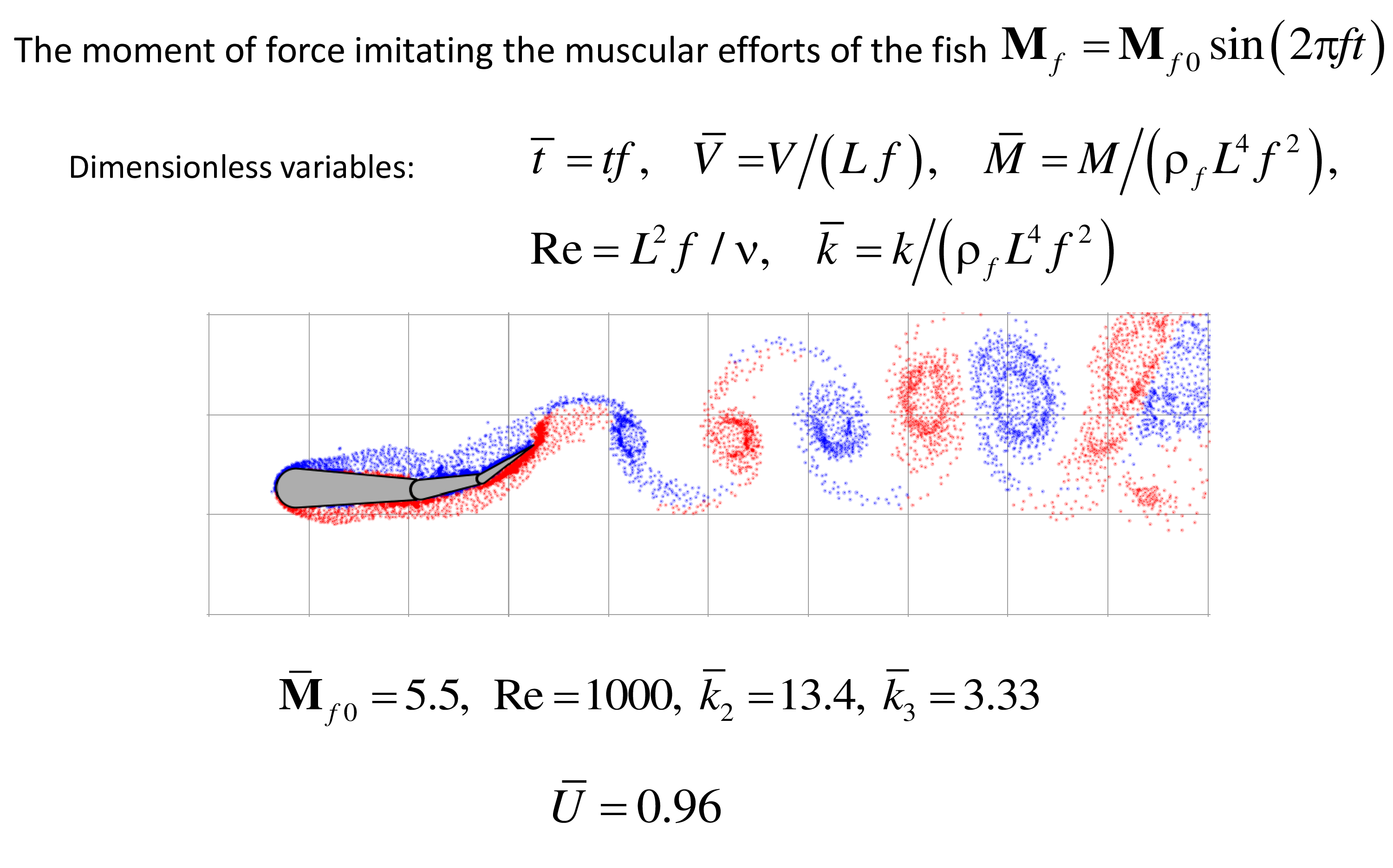
The moment of force Mf is applied between the first and second
sections by harmonic law, resulting in the bending of the fish body.
This simulates the muscular effort of a fish. The second hinge is elastic
and passive. The flow-structure task is solved.
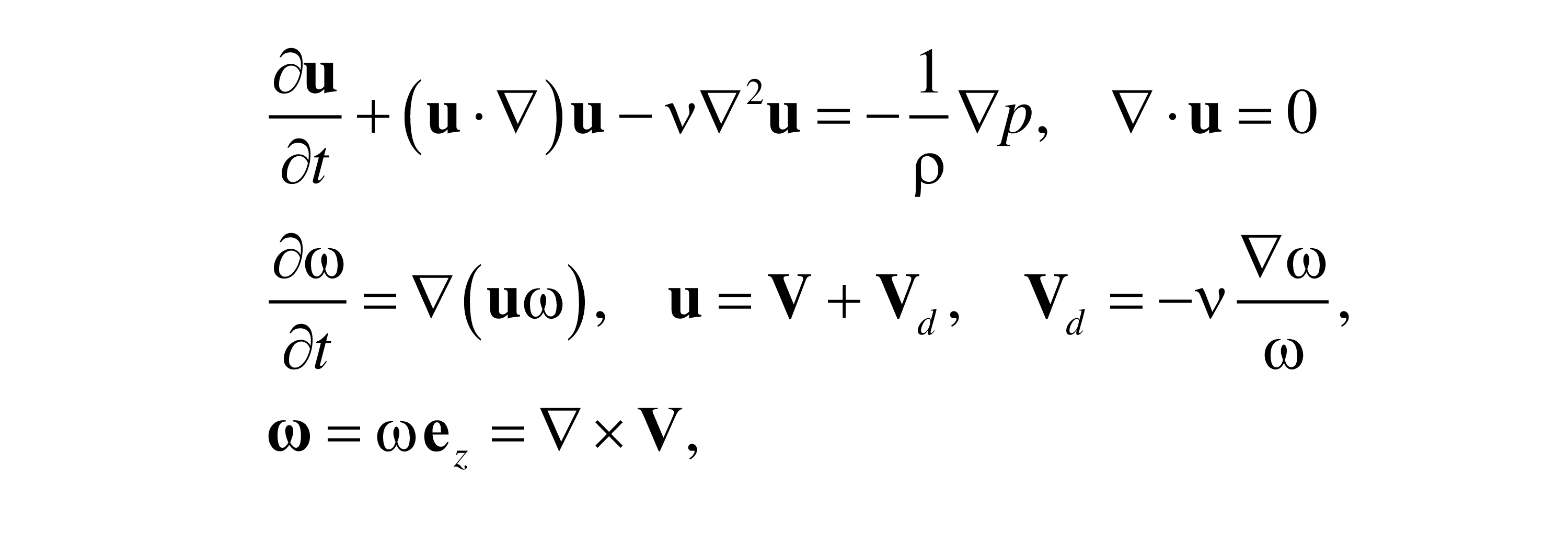
Numerical method of Viscous Vortex Domains
Governing equations:
Diffusion velocity:
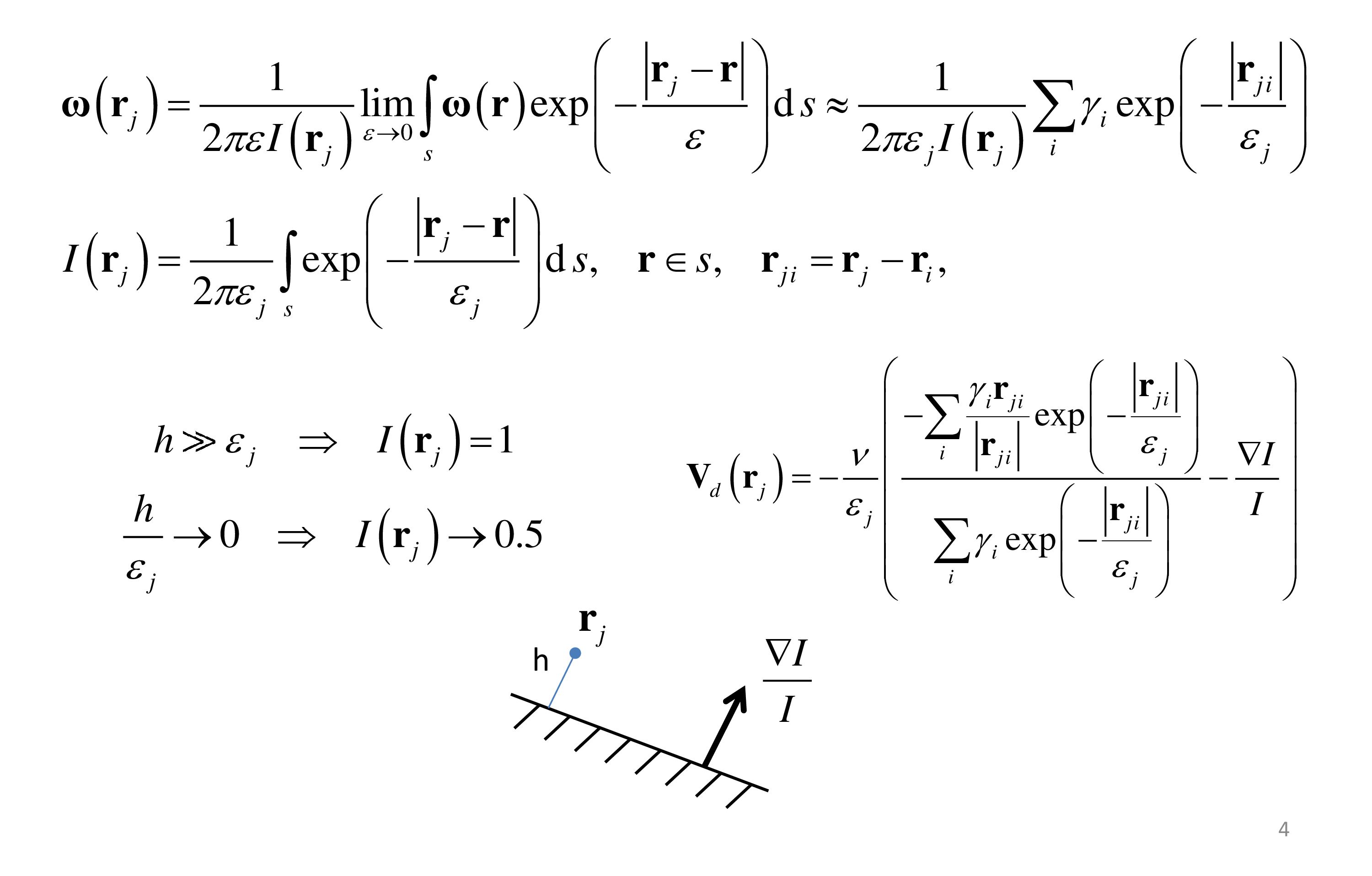
Boundary conditions
Biot-Savart law:
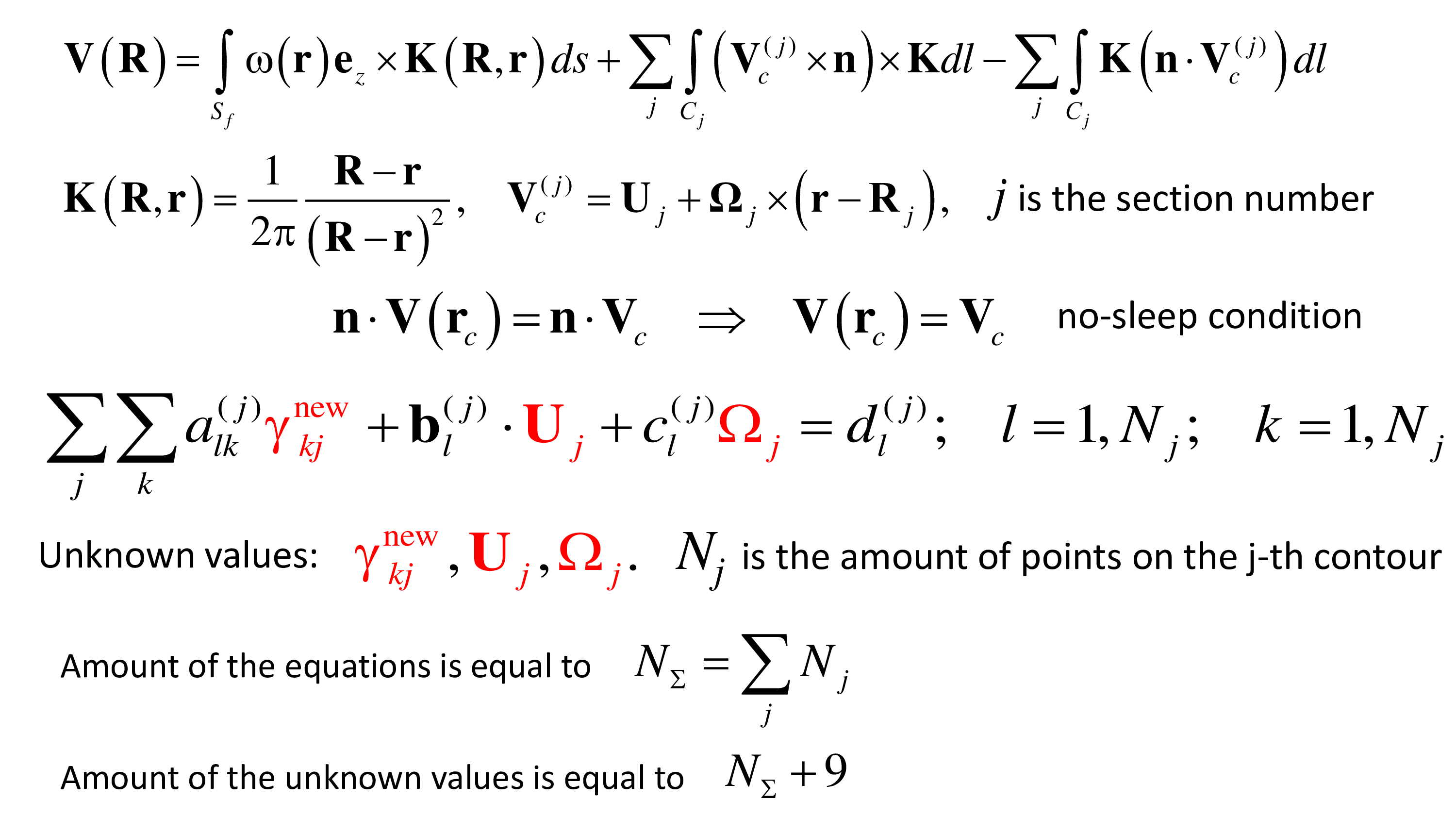
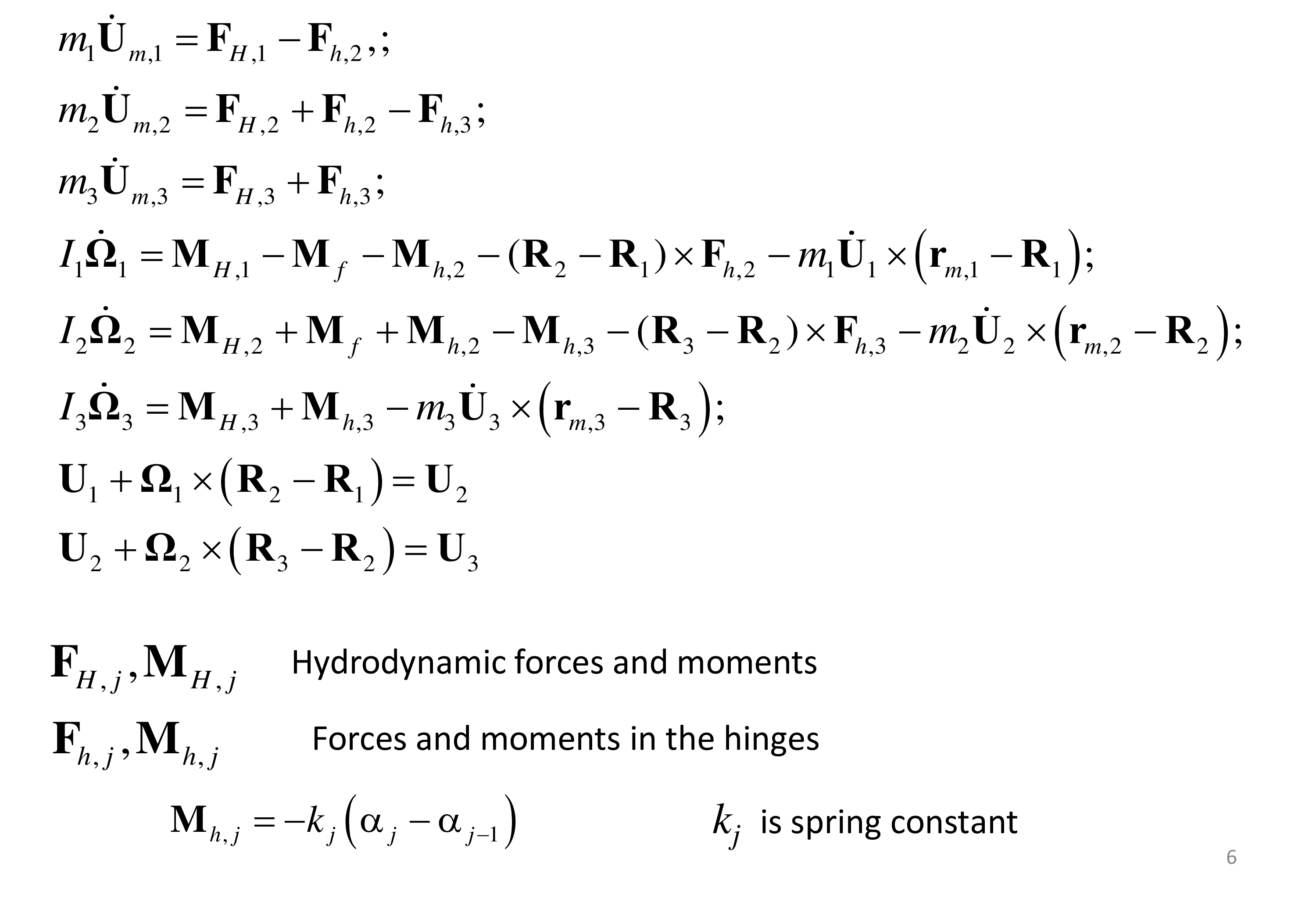
The equations of motion of the sections:
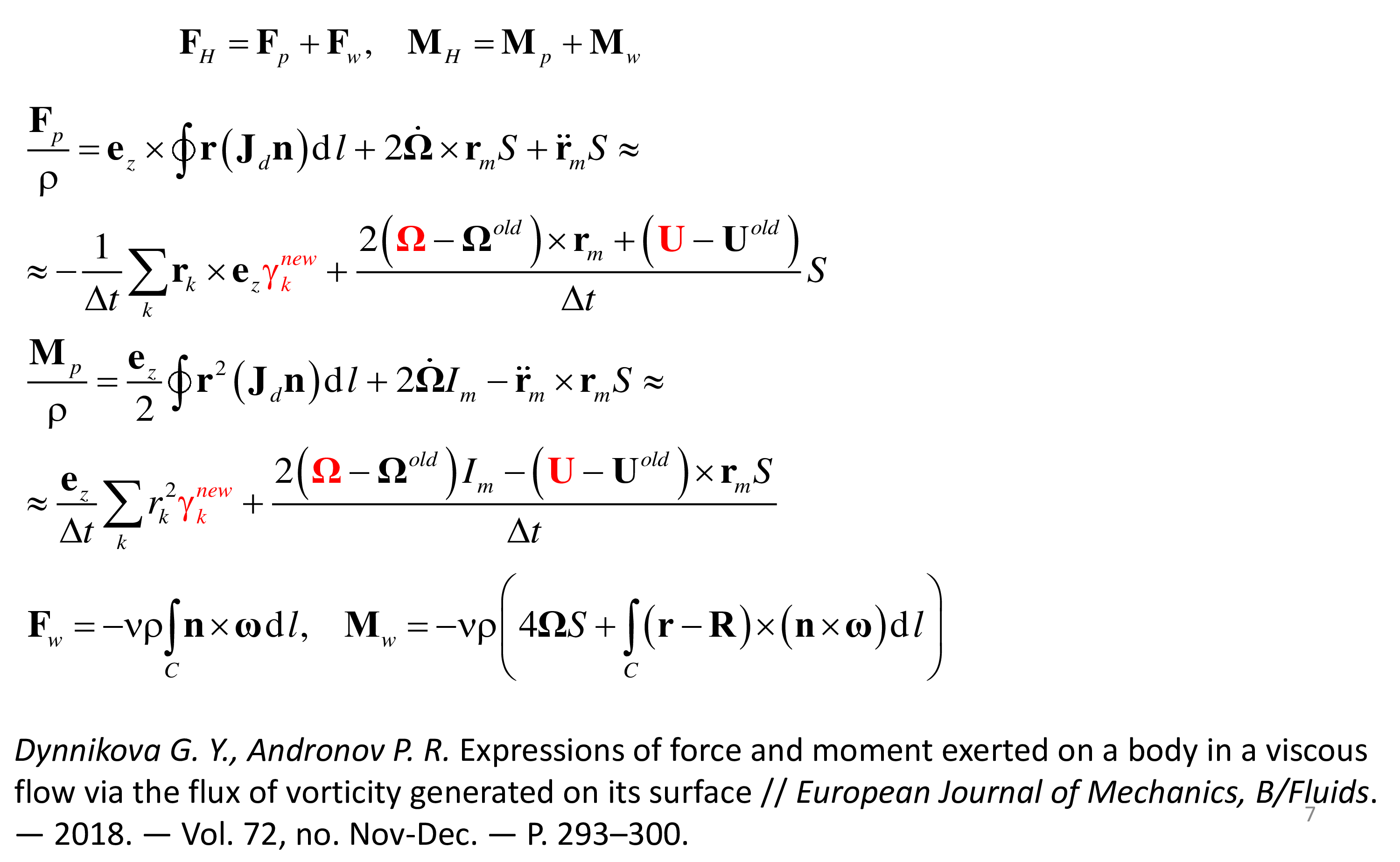
The expression of force and moment via the vortex flux from the surfaces
Substituting these expressions into the equations of motion of bodies, we obtain the equations, which, together with the equations of the boundary conditions, form a closed linear system of equations. The solution of this system gives us the values of the velocities of all sections and circulations of new particles simultaneously.
The numerical results
Rigid tail

Floppy tail

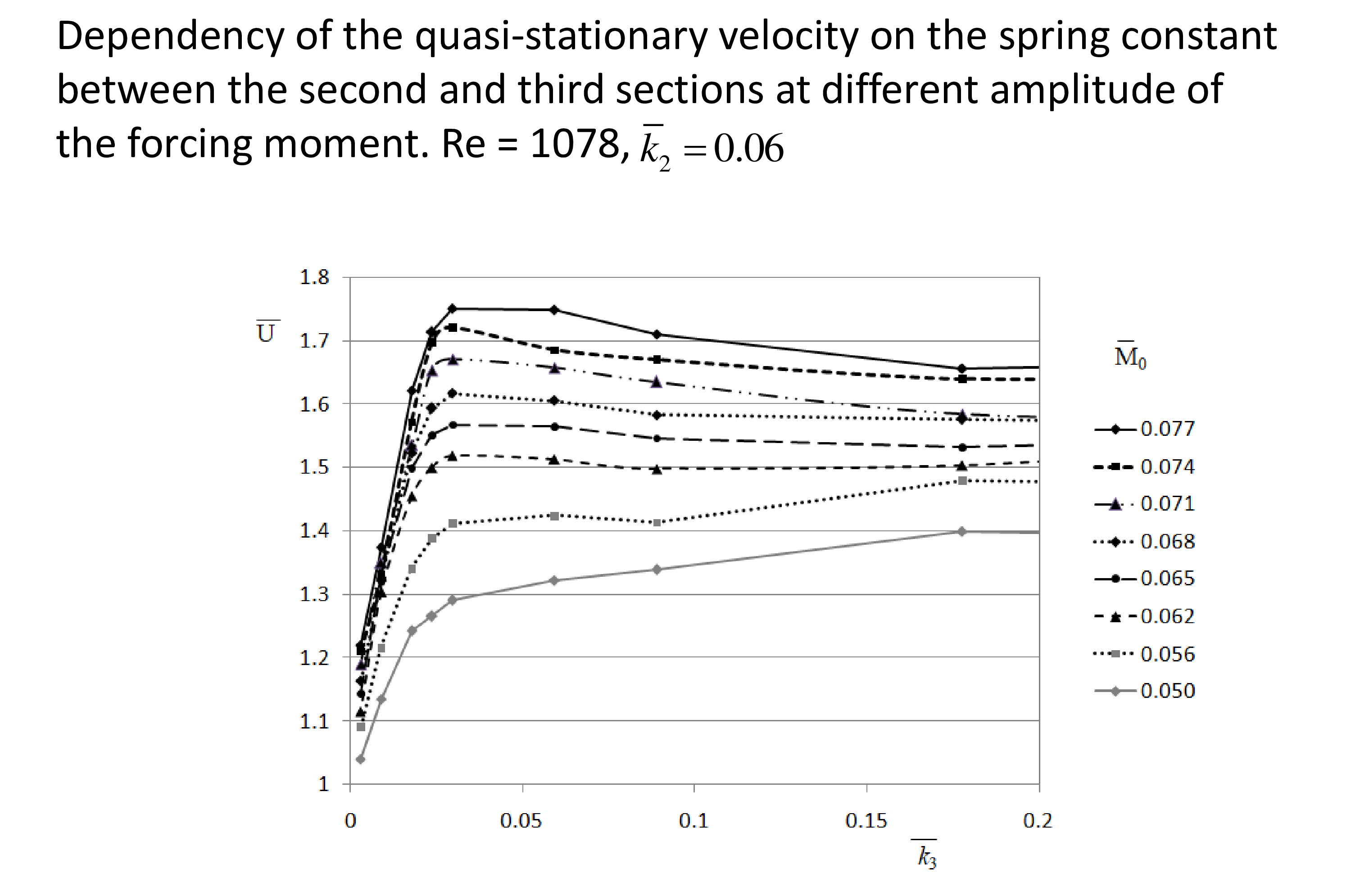
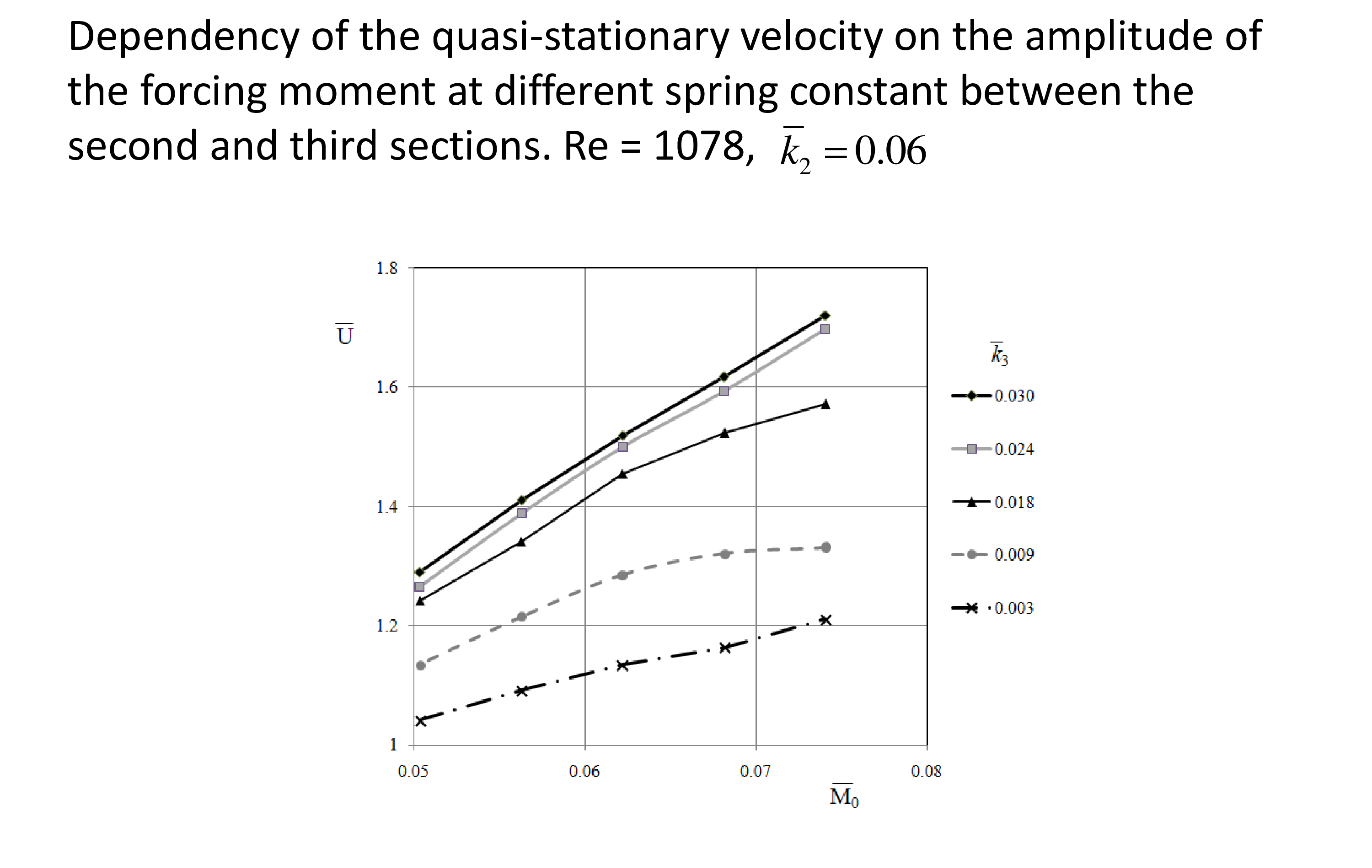
Parametric research
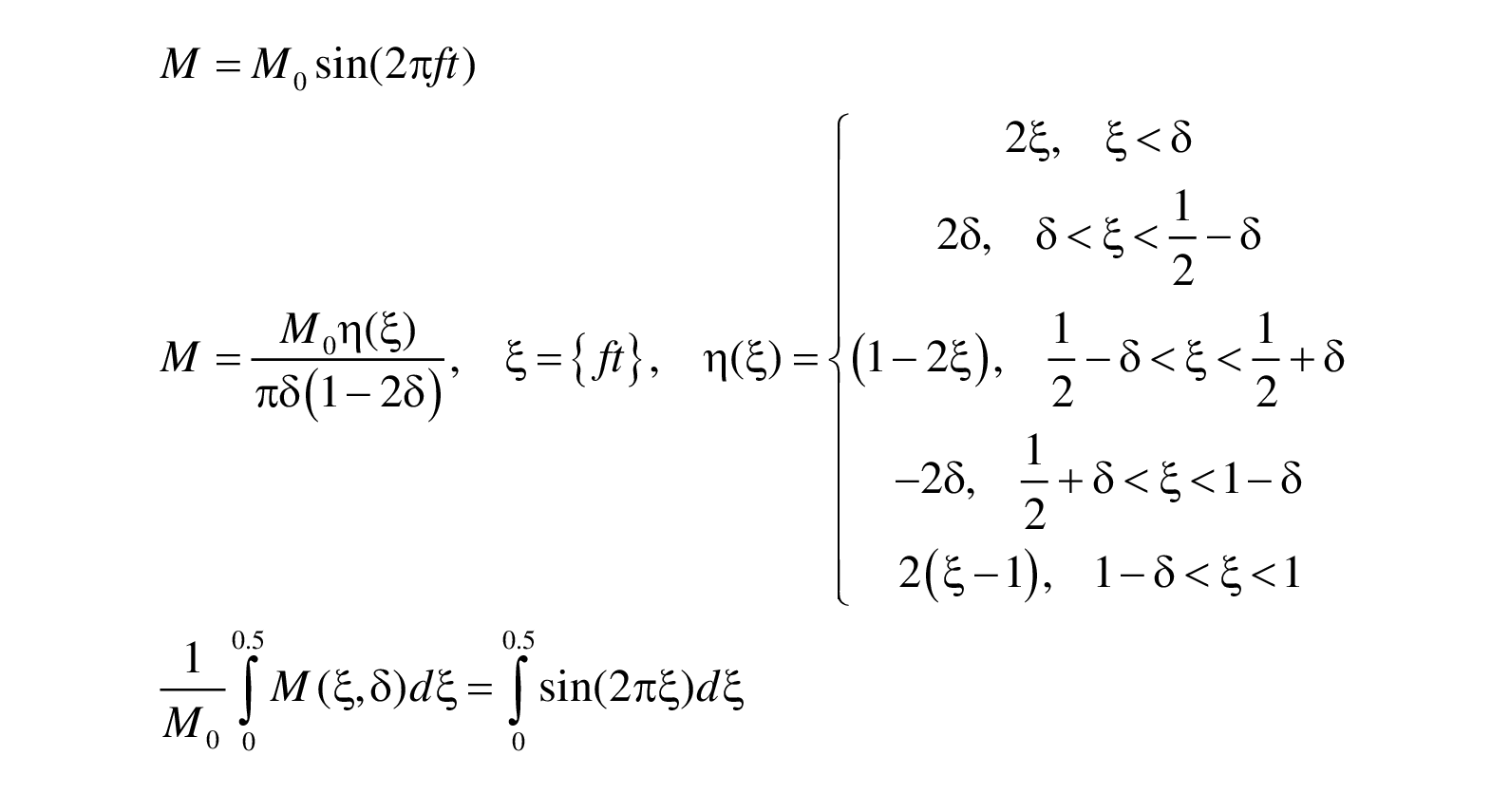
Piecewise linear and sinusoidal forcing moment
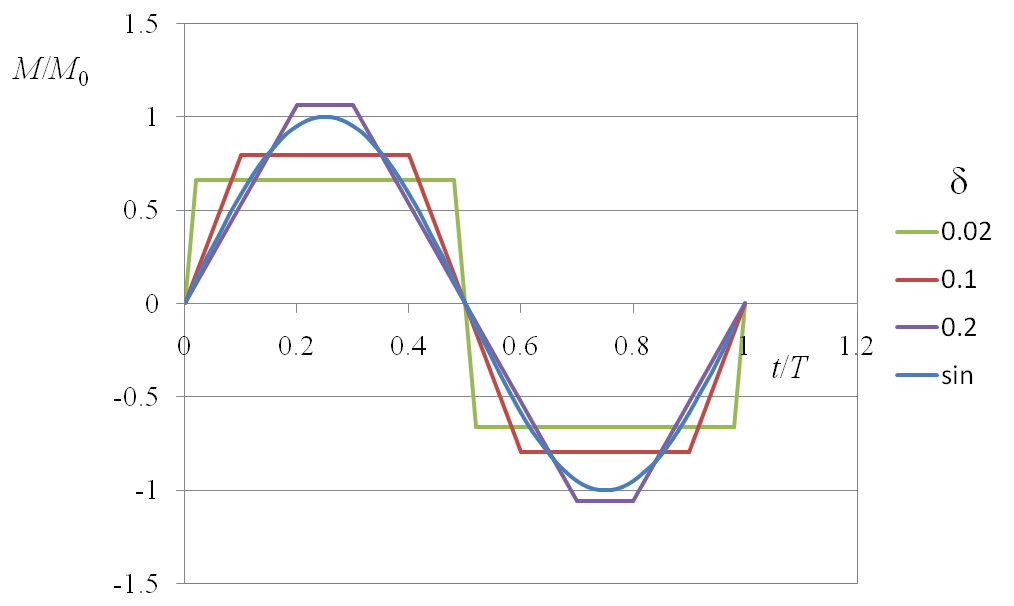
Comparison of sinusoidal and piecewise linear forcing moment at
delta = 0.03.
Conclusion
The methodology of modeling the body self- locomotion under own effort is developed. A method is applied for the fish-like model with the elastic hinges. The calculations performed by the developed method have shown its effectiveness. The dependency of the obtained quasi- stationary velocity on the elasticity is investigated. It is shown that very low spring constant of the hinge is not optimal as well as very high one.
Acknowlegment
The work was supported by the Russian Science Foundation (grant No. 18-71-00133).